



說到機器人和自動化,很多人腦里可能會立刻浮現一些生產線,比如汽車工廠的情景——一群機器人既高效又精確地執行任務,一天到晚不知疲倦,表現驚人。
但若仔細一想,本質上,這些傳統機器人只是在重復一遍又一遍相同的動作。而事實是,現實世界中的絕大部分任務,都要求我們對眼前的情況做出即時的調整。
一個能超越重復性、根據情況調整和思考的機器人,什么時候能夠面世?
AI機器人何時才能出現?
對這個問題,很多科幻電影都做出了回應。
《未來戰士》中,這些AI機器人來自未來,《西部世界》則遐想了它們將悄悄出現在我們身邊。這些想象衍生出了一連串人工智能可能出現的未來場景,有的駭人聽聞,有的振奮人心。
但從現實技術的層面來說,它未來的切入點究竟在哪里?實際上,它已經發生了——人工智能機器人已經不動聲色地進入了人類世界,并創造了價值。
那就是自主揀貨。
幾年前,這還是天方夜譚;但2020年1月,《紐約時報》就報道了由Covariant Brain公司制造的Knapp pick-it-easy機器人,靜悄悄地在某個低調的倉庫中,自主分揀訂單。
相對于傳統機器人,pick-it-easy面對的,是不斷在流水線中運轉的,超過6萬種的林林總總的貨物。它過去從未見過這些貨物,未來也會持續地見到其他新的貨物及組合——無論面前是什么,它需要反復識別,并一再調整自己的動作,做出決策——從哪提取、到哪卸放。
這是史上第一宗AI機器人的實例報導,一段長達一小時、連續無刪減的視頻,真實完整的向世人完整展示了機器人的運作流程:遇到什么問題,并如何調整。
AI機器人的自動化,不但已經發生,而且越來越重要。默默工作的過程中,它們正持續地累積經驗,從經驗中自我學習,一步步完善化。未來,我們將從沉悶的倉庫,拓展出更多閃亮的應用場景。
為什么AI機器人很難做?
這樣的機器人,技術難點究竟在哪里?
第一,識別
這個過程的程序要怎么寫?并不是我們想象的那么簡單,因為機器不認識圖片或文字,只能識別數字。
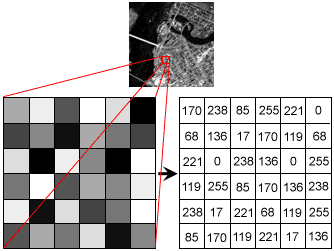
(計算機將圖片像素轉化為數字)
幾十年來,計算機視覺領域通過視覺技術嘗試讓機器了解圖像中的內容,但都沒有成功。直到2012年,多倫多大學Geoffrey Hinton團隊向世界展示了能以高準確度識別圖像的機器。
那他們是怎么辦到的呢?方法就是簡單粗暴地問機器:圖像里有什么。他們把問題分解成一系列的計算,最后導出圖像中的內容。這一系列的計算,就是深度神經網絡(Deep Neural Network;DNN)。
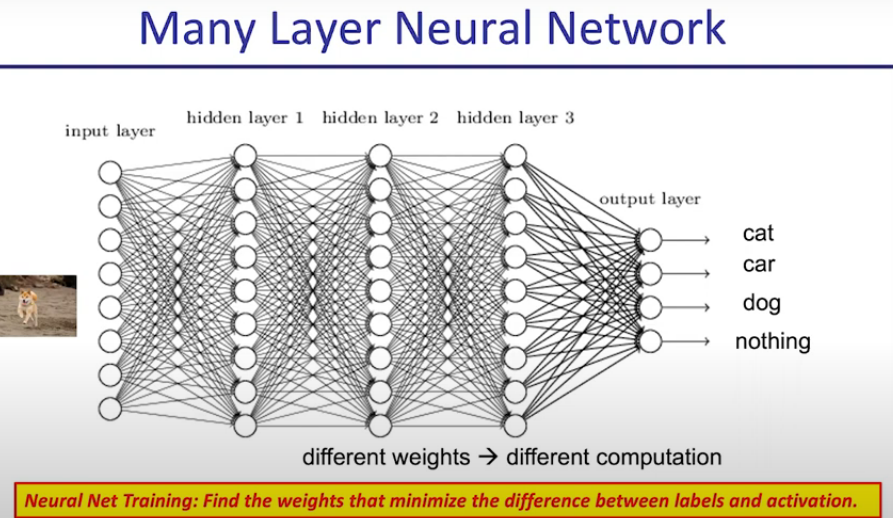
神經網絡由非常多的人造神經元組成。單獨來看,每個神經元都做著簡單的工作:接收信號、生成信號、輸出信號,但合在一起,它們可以完成非常復雜、高階的反應。
至于這些反應是什么,取決于這些神經元如何連結,以及連結有多強,尤其后者。隨著這些神經元連接強度的不同變化,系統會做出不同的決定:“這是貓、狗、人或車……”
這樣一來,識別圖像的問題,就從“計算機視覺的分辨問題”,簡化成了“神經元連接強度的調整問題”。但直接手動調整是不可行的,因為當中涉及了數以百萬計的神經元需要調整。
那我們要怎樣找到正確的設置?——給神經網絡“投喂”足夠多的例子,讓它在猜測中學習。
一開始的猜測固然完全隨機,但隨著每一次失敗,系統往回追溯,修改神經元之間的權重(連結強度),把系統一步步推向正確的結果。周而復始,最后神奇的事發生了,機器能分辨出圖像中的內容了。
在這個方法下,機器分辨得有多好?
在圖像識別領域里,曾有個ImageNet國際挑戰賽,2010年,最佳成績約28%誤差率,2011年也基本維持在相同水平線上,沒有太大突破。2012年,Geoffrey采取了深度神經網絡,將誤差率一舉降低到約15%,向前邁進了一大步。
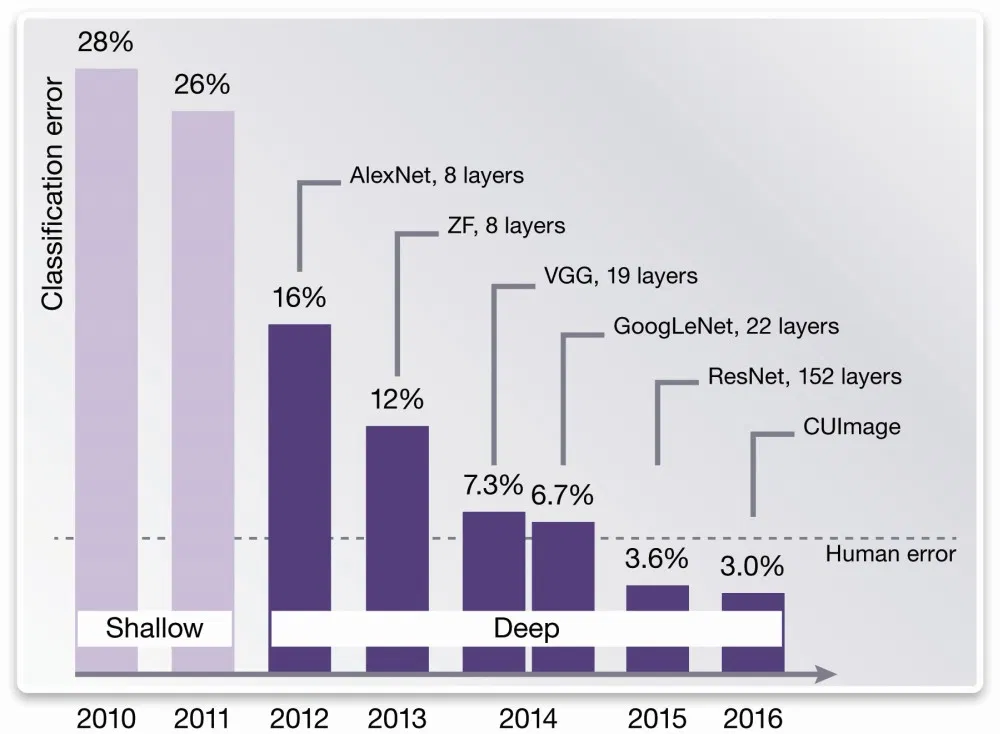
(從2010~2016年,各算法在圖像識別的錯誤率)
隨后幾年,人們在神經網絡的基礎上進行修改,機器的誤差率逐年下降,甚至超越了人類。如今,這個比賽已經徹底退出了歷史舞臺。
第二,行動
機器不但需要識別,還需要行動。如何讓系統做出正確的行動決策?
2015年,DeepMind攻克了圍棋,打敗了世界冠軍棋手。本來人們還以為這需要數十年的時間,但一夜之間就實現了。
DeepMind編了一個神經網絡,自己和自己下棋——為求簡化,這里說的是2017年的版本,AlphaGoZero——在每一盤自我對弈中摸索、試錯、學習,越變越好,最后戰勝棋手。
不單是圍棋,其他游戲也被機器用同樣的方式攻克了。
和識別不同的是,識別是單一步驟的事情,我們讓系統去判斷一張圖是狗還是其他動物;而行動則不一樣,你并沒有告訴系統每一步該做什么。它只知道最后的結果是贏或輸,然后從結果中自我改善。
具體來說,他們在贏(或輸)的局面中找出共同點,在贏和輸之間揪出差異,把它們分解出來。這就是強化學習(Reinforcement Learning;RL)。
而深度強化學習,是在強化學習模式下搭配一個神經網絡吸收經驗,根據每一段經驗改變神經元的權重。
顯然,除了棋牌和游戲,這個原理也適用于機器操作。
加利福尼亞大學伯克利分校通過類似的神經網絡,編寫了一個虛擬機器人,最開始半步都跨不出,后來踉踉蹌蹌,一直自我訓練到能維持長時間奔跑的狀態。我第一次看見的時候,心里激動不已。
值得一提的是,這個程序可以重復在別的場合使用,即便是不一樣的機器人、不一樣的任務。事實上,加利福尼亞大學伯克利分校在這個實驗中就賦能了機器人一系列的任務,比如翻跟斗、跨越障礙、高處跳落等等。
接著,他們將這個虛擬程序安裝到實際的機器人上,由此制造出機器人BRETT,讓它將積木放到匹配的空位當中。要完成這項任務,它需要學習視覺識別系統,以及行為控制系統。
一開始,它完全不知道該怎么做,但隨著每一次偶爾的成功,系統內不斷進行強化,最終達到了能可靠完成任務的水平。
如果能搭配一個機器人艦隊,一起學習、共享神經網絡,這個過程還能變得更簡單、更快速。
AI機器人為什么還沒普及?
看起來,這一切已經萬事俱備,只要把研究的成功復刻到現實,一切就會很完美。但直到今天,AI機器人依舊沒有普及,差的東風在哪里?
值得注意的是,上述的成功都發生在虛擬或實驗室的研究場景,而并非現實應用。
在實驗室的研究中,研究人員專注的是從無到有、從0到1的過程,做一些過去沒做過的事,對精準度的要求不高,往往是達到70%就會轉到下一個指標。
但在現實中,我們對可靠性的要求完全不是一個等級。很多時候,精準度到90%都不足夠。
以一個工廠實際場景為例,一個機器人每小時負責500~2000個任務,90%的準確率意味著每小時有50~200個需要修正的錯漏。一般而言,修正比任務本身所花費的功夫還更大;換句話說,在90%準確率下,機器人帶來的麻煩比省下的時間還多。
就現實而言,機器人真正價值的體現,是當它們每小時只需要人類1~2次的干預;如此一來,人類就可以同時監督多處的多個機器人。這就意味著如果一個機器人負責500個任務,準確率必須在99.6以上;如果負責2000個任務,準確率則必須在99.9以上。
可見,這是和實驗室的研究場景迥然不同的要求。
這時,有些人可能會想:這還不容易,建更大的神經網絡、提供更多的經驗數據,不斷重復,不就行了?
如果是識別圖像、識別字符之類的任務,這思路是可行的,因為任務本身比較單一,搜取更多的數據去提高精準度是可以辦到的。但現實中我們希望讓機器人處理的場景,比這些任務多更多的額外細節需要處理。
首先,系統不能夠忽視世界的長尾效應。我們身處的世界,是一個高變化、大方差的環境。
在ImageNet識別測驗里,系統僅僅是分辨一千個圖;但在現實世界中,系統有百萬、千萬種物品需要辨識,同時還存在著程度不一的透明及反光視效,有些則極其凌亂,和不同的物體視覺混雜在一起等等。
其次,系統不能夠忽視世界的動態本質。
學會奔跑的加利福尼亞大學伯克利分校的虛擬機器人,它的環境設定是不變的;可是現實世界,比如在一個貨倉里,人來人去,每個人卸包裹、拆包裹的方式、位置都持續在變化。現實經常處于一個高速的動態環境中,而遠不像機器訓練時的靜態環境。
另外,系統不能夠忽視自己的無知時刻。
當系統遇到它不知道或不確定的情況,它必須知道自己不知道,轉而求助于備份方案,比如交由其他熟悉的人處理等,而不是強行做出某個決策。
AI機器人下一個應用場景在哪?
無人機、自動駕駛、機械手,誰更有可能成為下一個實現的夢境?表面看來,無人機似乎最難,因為人類不會飛——但事實恰好相反。
無人機面對的場景相對簡單,因為本質上它只是在空曠的空間里穿梭,直到到達某個目的地。當然,它也會遇到一些突發狀況,比如附近出現一些移動物體,導致它忽然處于一個復雜的動態環境。但以實際的應用場景來說,真正的難點還是在于政府對領空的管轄,以及硬件質量的配合,而不是在于更聰明的人工智能。
至于自動駕駛和機械手,單從技術層面看,自動駕駛其實更簡單。因為駕駛最主要的在于閃避危險,無需和環境互動;而機械手則需要接觸物體,和物件進行互動,這又增加了一個維度的復雜性。
然而,從犯錯代價的角度,自動駕駛一旦出現失誤,最壞的情況可能是丟了性命,而在快遞領域,失誤頂多意味著送錯或送不到。機械手也是類似,至少不是性命攸關。
所以,自動駕駛雖然是現在萬眾矚目、眾望所歸的領域,我相信不會是第一波人工智能機器人付諸實現的應用場景。
總的來說,2020年,是人工智能機器人的元年——你或許還沒看見,但它已經在倉庫里無聲啟動。
文章來源:高山書院